◆概要
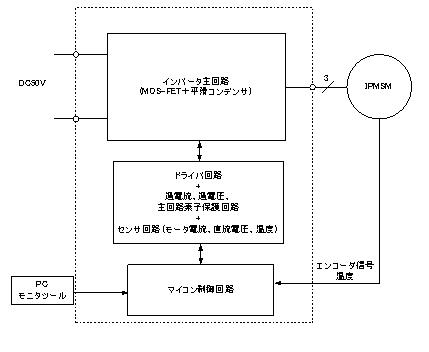
本インバータは、パワー回路(ディスクリートMOS- FET+ドライブ回路)+マイコン制御回路から構成され、10kW/50VクラスのIPMSMを駆動できます。
システム構成図
◆仕様
| 主回路仕様 | |||
| 項目 | 仕様 | ||
| 図番 | PS-GL0092 | ||
|
入出力 |
適用可能モータ | 10kW | |
| 定格電流 | 200Arms | ||
| 入力電圧 | DC30~60V | ||
| PWM周波数 | 最大20kHz | ||
| AD検出信号 | U相電流 | ||
| V相電流 | |||
| W相電流 | |||
| 直流電圧 | |||
| モータ温度×1 | |||
| ヒートシンク温度 | |||
| 電流検出方式 | ホールCT | ||
| ハードウェア保護機能 | モータ過電流 | ||
| ヒートシンク温度異常 | |||
| DC過電圧 | |||
| 冷却方式 | 強制空冷 | ||
| 制御仕様 | |||
| 項目 | 仕様 | ||
| モータ制御方式 | ベクトル制御 | ||
| 機能一覧 | ①トルク制御/電流制御。 ②回転数制御 ③弱め磁束制御機能(フィーバック式) ④過変調制御 ⑤デッドタイム補償制御 ⑥異常保護機能(過電流、過電圧など) ⑦PWMキャリア可変機能 |
||
| 位置検出方式 | ABZエンコーダ | ||
| 制御周波数 | PWM周波数の2倍 | ||
| 回転数範囲 | 17,000min-1 | ||
| 回転方向 | CW/CCW | ||
| 回転数設定方法 | PCより | ||
| 運転/停止方法 | |||
| トルク/回転数指令値設定方法 | |||
| 使用マイコン | V850E2/PJ4 | ||
| 制御電源 | AC100V | ||







 ←投稿動画一覧
←投稿動画一覧